

High-performance distance measurement sensor modules
Discover the Terabee range of distance measurement sensors
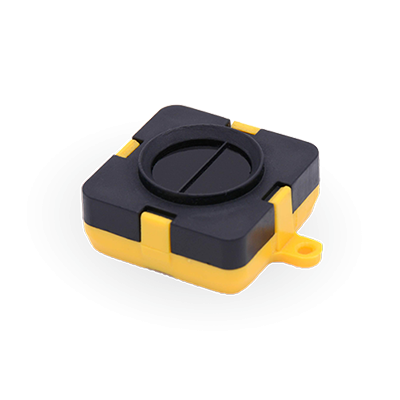
INDIVIDUAL DISTANCE MEASUREMENT SENSORS
For your applications that need precision distance measurement and object detection sensing up to 60 meters.





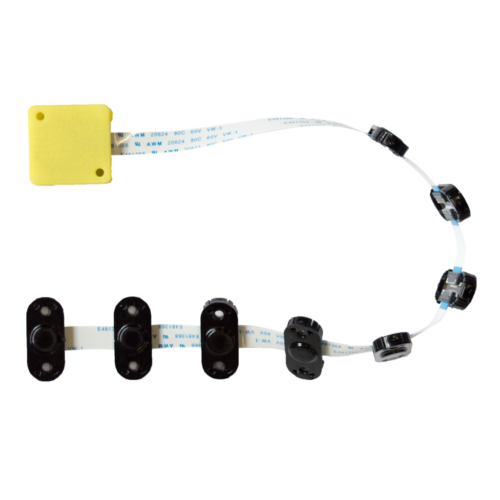
MULTIDIRECTIONAL ARRAYS
Ideal for collision avoidance and obstacle detection for mobile robotics and UAVs, these products combine multiple ToF distance sensors to provide plug and play multi-sensor, multi-axis solutions.

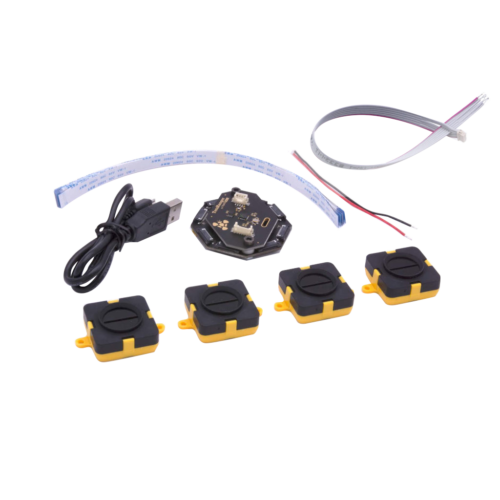
EVALUATION KITS
Test a variety of sensors and interface options to find the products that meet your needs. Free graphical user interfaces are available to stream distance data from each of the Evo sensors. Simply clip a USB interface backboard to an Evo sensor, connect to your PC and obtain data for easy testing.

LiDAR ToF for Versatile Applications
Measure calibrated distance values in millimeters at hight speed. Terabee Time-of-Flight optical distance sensors are small, lightweight and high-performance, making them ideal for your applications.




Easily set up testing and data streaming to your PC. Plug and play with an intuitive graphical user interface.

Benefit from Infrared LED technology
Eye-safety
Eye-safe in all conditions with no need for Laser Class 1 safety precautions.
Field of View
Rather than measuring a very small point, the emitted light is spread to form a Field of View and measure over an area. This provides a more stable data stream in many use cases.
Low power consumption
LED’s are energy efficient: great for power saving and battery-powered applications.
Compact, Lightweight form factor
Easy to integrate.
Integrate our sensor modules into your products and solutions
Terabee brings new ideas and unique solutions to complex robotics, automation, monitoring, and IoT challenges. Our LiDAR ToF distance measurement sensors have been developed to address a broad range of applications where high-performance distance sensing brings new value and adds an extra layer of intelligence to your application. If you require a custom sensing solution, let’s talk!






