People counting accessories: seamless options for enhanced connectivity
BACnet GATEWAY
Simple people counting accessories to integrate with existing Building Management Systems
The BACnet Gateway is the best accessory among the people counting accessories. It is able to connect people counting data and infrastructure to existing Building Management Systems (BMS), allowing optimised use of resources via smart and adaptable control systems.
Moreover, the Gateway can be used as a local device management system, and allows batch configuration and updates to People Counting devices. It can be accessed via cellular network, enabling remote monitoring, management, and updates from virtually anywhere with mobile connectivity.
For proper installation of Terabee devices in spaces with extra high ceilings
The Telescopic Mounting Pole helps position all Terabee products at the right distance from walls and floors, particularly beneficial in spaces featuring high ceilings or presenting challenging access points.
People counting accessories: optimal positioning – Elegant design
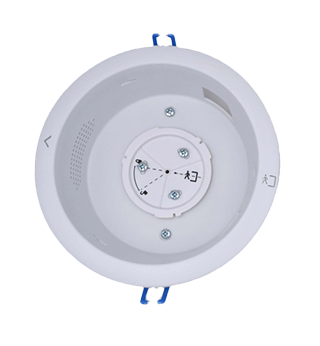
Recess Mounting Kit
Easy and attractive mounting options for suspended ceilings
The People Counter is easily installed into a standard 16cm diameter LED light hole, ensuring a stylish and discreet look that blends seamlessly into the ceiling.
Available in two versions: one for FLOW and one for OCCUPANCY and FLOW M.
For proper installation of Terabee devices in spaces with extra high ceilings
The Telescopic Mounting Pole helps position all Terabee products at the right distance from walls and floors, particularly beneficial in spaces featuring high ceilings or presenting challenging access points.
People counting accessories: reliable Power supplies for wireless connectivity
POWER SUPPLY 5V
For FLOW (only for LoRa versions)
This 5V – 3A power supply with up to 20W output is suitable for powering the LoRa version of FLOW (People Flow Counting L-XL). It comes with a 2.5m micro USB cable and 5 interchangeable power plugs compatible with most worldwide power outlets. Using a non-original power supply with specs below 5V – 3A is not advised.
Official power supply for OCCUPANCY and FLOW M when streaming data via Wi-Fi or LoRa. The power supply comes with a universal Type-C plug, and outputs reliably 12V – 1A.